Functions | |
| template<typename Tile , typename Policy > | |
| auto | rank_local_cholesky (const DistArray< Tile, Policy > &A) |
| template<typename Array , typename = std::enable_if_t<TiledArray::detail::is_array_v<Array>>> | |
| auto | cholesky (const Array &A, TiledRange l_trange=TiledRange()) |
| Compute the Cholesky factorization of a HPD rank-2 tensor. More... | |
| template<typename ContiguousTensor , typename = std::enable_if_t< TiledArray::detail::is_contiguous_tensor_v<ContiguousTensor>>> | |
| auto | cholesky (const ContiguousTensor &A) |
| Compute the Cholesky factorization of a HPD rank-2 tensor. More... | |
| template<bool Both, typename Array , typename = std::enable_if_t<TiledArray::detail::is_array_v<Array>>> | |
| auto | cholesky_linv (const Array &A, TiledRange l_trange=TiledRange()) |
| Compute the inverse of the Cholesky factor of an HPD rank-2 tensor. Optionally return the Cholesky factor itself. More... | |
| template<typename Array , typename = std::enable_if_t<TiledArray::detail::is_array_v<Array>>> | |
| auto | cholesky_solve (const Array &A, const Array &B, TiledRange x_trange=TiledRange()) |
| template<typename Array , typename = std::enable_if_t<TiledArray::detail::is_array_v<Array>>> | |
| auto | cholesky_lsolve (Op transpose, const Array &A, const Array &B, TiledRange l_trange=TiledRange(), TiledRange x_trange=TiledRange()) |
| template<typename Array > | |
| auto | heig (const Array &A, TiledRange evec_trange=TiledRange()) |
| Solve the standard eigenvalue problem with LAPACK. More... | |
| template<typename ArrayA , typename ArrayB , typename EVecType = ArrayA> | |
| auto | heig (const ArrayA &A, const ArrayB &B, TiledRange evec_trange=TiledRange()) |
| Solve the generalized eigenvalue problem with LAPACK. More... | |
| template<typename ArrayA , typename ArrayB > | |
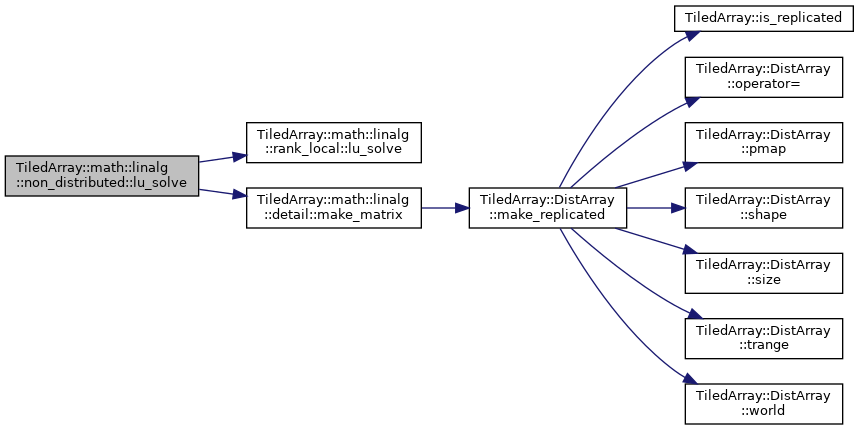
| auto | lu_solve (const ArrayA &A, const ArrayB &B, TiledRange x_trange=TiledRange()) |
| Solve a linear system via LU factorization. More... | |
| template<typename Array > | |
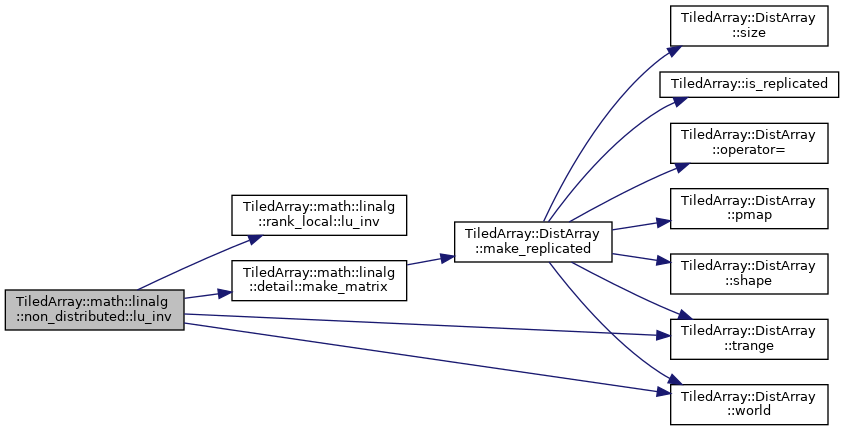
| auto | lu_inv (const Array &A, TiledRange ainv_trange=TiledRange()) |
| Invert a matrix via LU. More... | |
| template<SVD::Vectors Vectors, typename Array > | |
| auto | svd (const Array &A, TiledRange u_trange=TiledRange(), TiledRange vt_trange=TiledRange()) |
| Compute the singular value decomposition (SVD) via ScaLAPACK. More... | |
Function Documentation
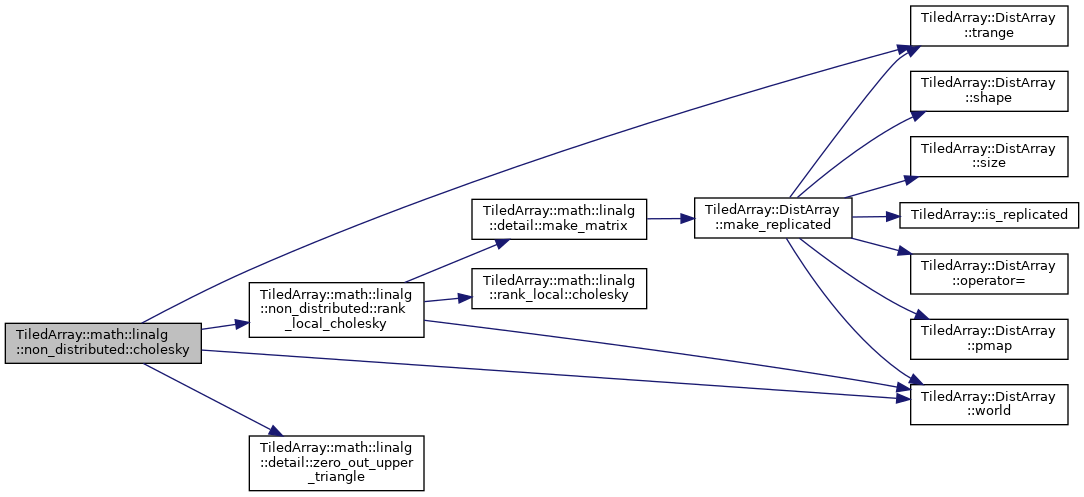
◆ cholesky() [1/2]
| auto TiledArray::math::linalg::non_distributed::cholesky | ( | const Array & | A, |
| TiledRange | l_trange = TiledRange() |
||
| ) |
Compute the Cholesky factorization of a HPD rank-2 tensor.
A(i,j) = L(i,k) * conj(L(j,k))
Example Usage:
auto L = cholesky(A, ...)
- Template Parameters
-
Array a DistArray type (i.e., is_array_v<Array>is true)
- Parameters
-
[in] A Input array to be diagonalized. Must be rank-2 [in] l_trange TiledRange for resulting Cholesky factor. If left empty, will default to array.trange()
- Returns
- The lower triangular Cholesky factor L in TA format
- Note
- this is a collective operation with respect to the world of
A
Definition at line 72 of file cholesky.h.
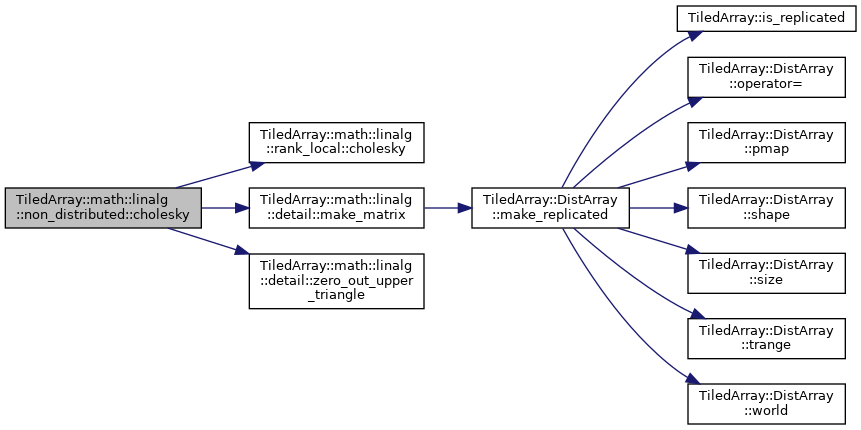
◆ cholesky() [2/2]
| auto TiledArray::math::linalg::non_distributed::cholesky | ( | const ContiguousTensor & | A | ) |
Compute the Cholesky factorization of a HPD rank-2 tensor.
A(i,j) = L(i,k) * conj(L(j,k))
Example Usage:
auto L = cholesky(A, ...)
- Template Parameters
-
ContiguousTensor a contiguous tensor type (i.e., is_contiguous_tensor_v<ContiguousTensor>is true)
- Parameters
-
[in] A Input array to be diagonalized. Must be rank-2
- Returns
- The lower triangular Cholesky factor L as a ContiguousTensor
- Note
- this is a non-collective operation, only computes on the rank on which invoked
Definition at line 99 of file cholesky.h.
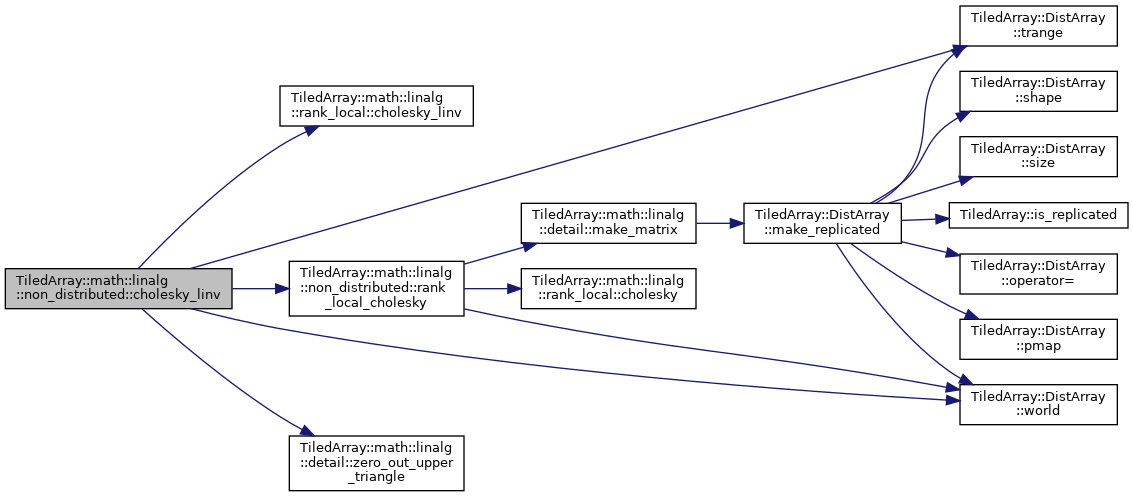
◆ cholesky_linv()
| auto TiledArray::math::linalg::non_distributed::cholesky_linv | ( | const Array & | A, |
| TiledRange | l_trange = TiledRange() |
||
| ) |
Compute the inverse of the Cholesky factor of an HPD rank-2 tensor. Optionally return the Cholesky factor itself.
A(i,j) = L(i,k) * conj(L(j,k)) -> compute Linv
Example Usage:
auto Linv = cholesky_Linv(A, ...) auto [L,Linv] = cholesky_Linv<decltype(A),true>(A, ...)
- Template Parameters
-
Array a DistArray type (i.e., is_array_v<Array>is true)RetL Whether or not to return the cholesky factor
- Parameters
-
[in] A Input array to be diagonalized. Must be rank-2 [in] l_trange TiledRange for resulting inverse Cholesky factor. If left empty, will default to array.trange()
- Returns
- The inverse lower triangular Cholesky factor in TA format
- Note
- this is a collective operation with respect to the world of
A
Definition at line 129 of file cholesky.h.
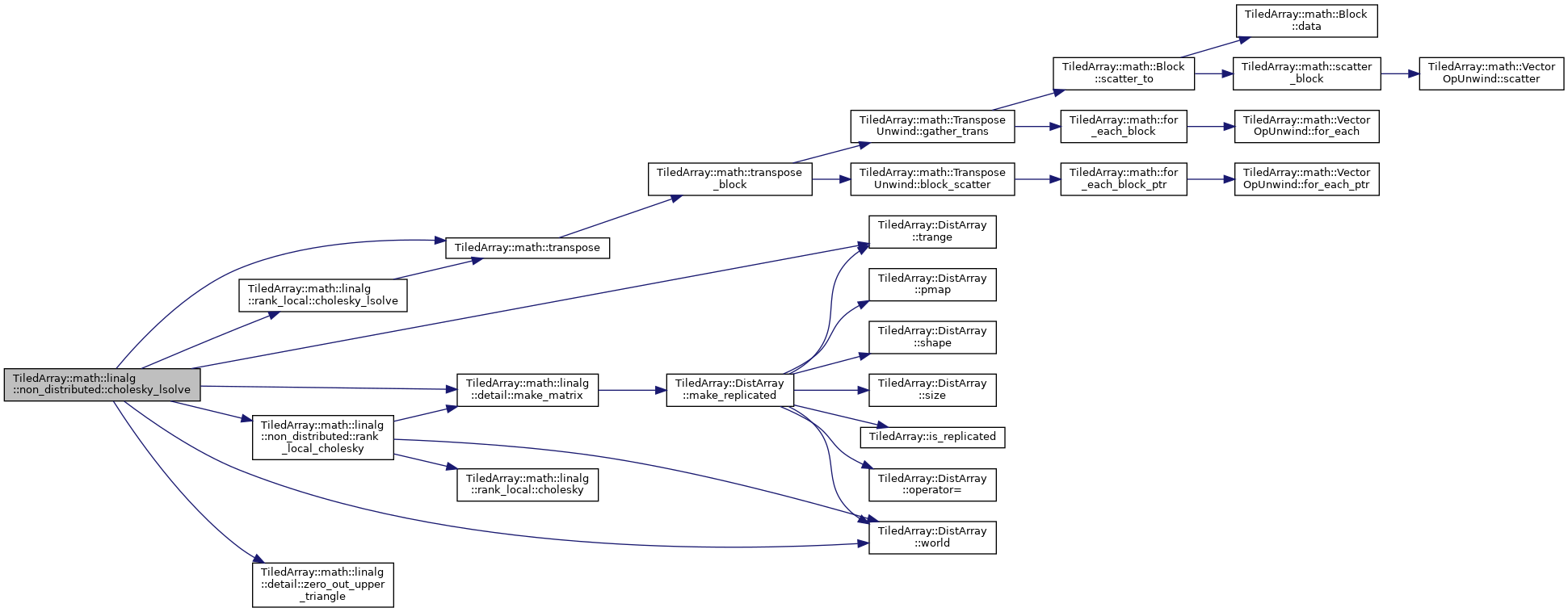
◆ cholesky_lsolve()
| auto TiledArray::math::linalg::non_distributed::cholesky_lsolve | ( | Op | transpose, |
| const Array & | A, | ||
| const Array & | B, | ||
| TiledRange | l_trange = TiledRange(), |
||
| TiledRange | x_trange = TiledRange() |
||
| ) |
Definition at line 176 of file cholesky.h.

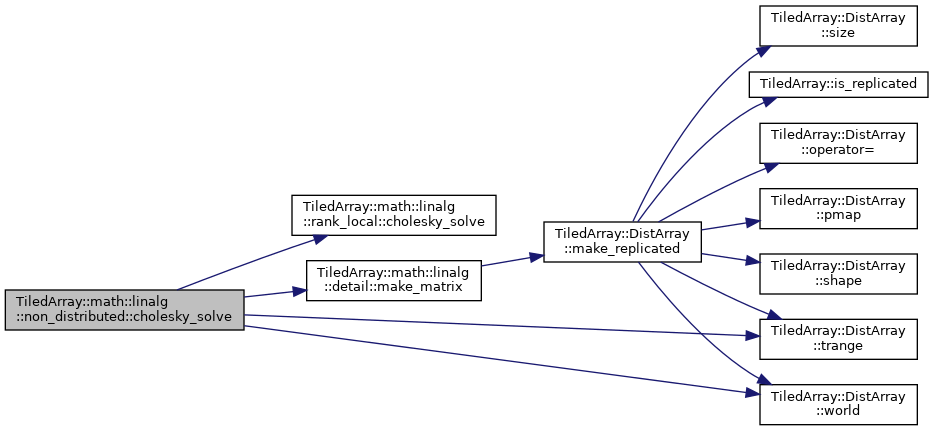
◆ cholesky_solve()
| auto TiledArray::math::linalg::non_distributed::cholesky_solve | ( | const Array & | A, |
| const Array & | B, | ||
| TiledRange | x_trange = TiledRange() |
||
| ) |
Definition at line 156 of file cholesky.h.

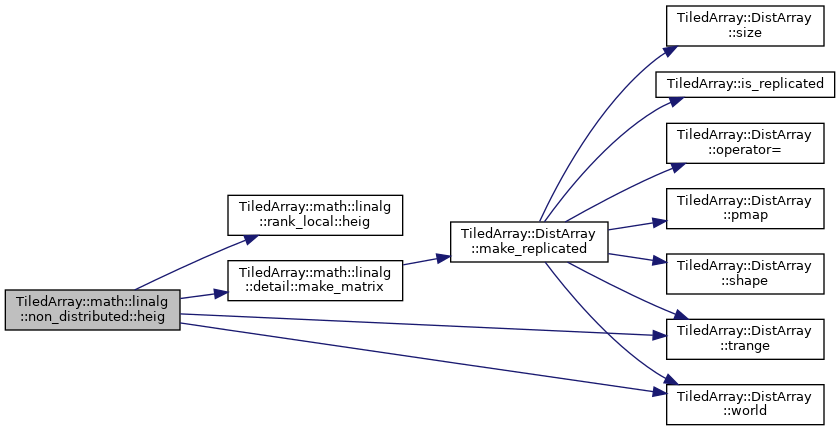
◆ heig() [1/2]
| auto TiledArray::math::linalg::non_distributed::heig | ( | const Array & | A, |
| TiledRange | evec_trange = TiledRange() |
||
| ) |
Solve the standard eigenvalue problem with LAPACK.
A(i,k) X(k,j) = X(i,j) E(j)
Example Usage:
auto [E, X] = heig(A, ...)
- Template Parameters
-
Array Input array type
- Parameters
-
[in] A Input array to be diagonalized. Must be rank-2 [in] evec_trange TiledRange for resulting eigenvectors. If left empty, will default to array.trange()
- Returns
- A tuple containing the eigenvalues and eigenvectors of input array as std::vector and in TA format, respectively.
Definition at line 54 of file heig.h.

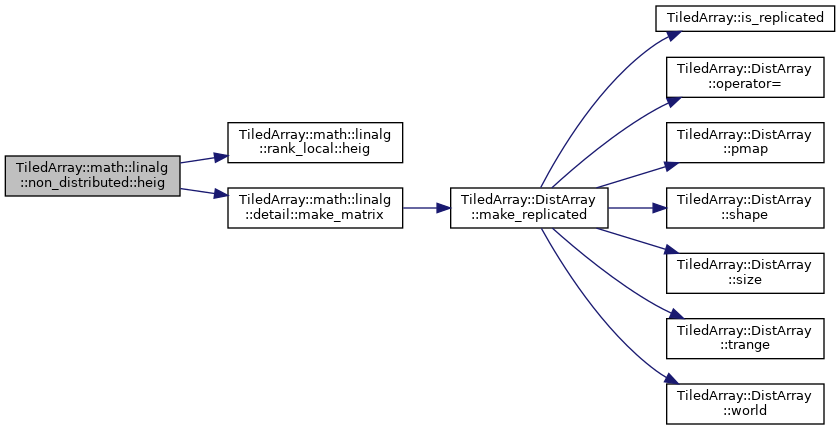
◆ heig() [2/2]
| auto TiledArray::math::linalg::non_distributed::heig | ( | const ArrayA & | A, |
| const ArrayB & | B, | ||
| TiledRange | evec_trange = TiledRange() |
||
| ) |
Solve the generalized eigenvalue problem with LAPACK.
A(i,k) X(k,j) = B(i,k) X(k,j) E(j)
with
X(k,i) B(k,l) X(l,j) = I(i,j)
Example Usage:
auto [E, X] = heig(A, B, ...)
- Template Parameters
-
Array Input array type
- Parameters
-
[in] A Input array to be diagonalized. Must be rank-2 [in] B Positive-definite matrix [in] evec_trange TiledRange for resulting eigenvectors. If left empty, will default to array.trange()
- Returns
- A tuple containing the eigenvalues and eigenvectors of input array as std::vector and in TA format, respectively.
Definition at line 95 of file heig.h.
◆ lu_inv()
| auto TiledArray::math::linalg::non_distributed::lu_inv | ( | const Array & | A, |
| TiledRange | ainv_trange = TiledRange() |
||
| ) |

◆ lu_solve()
| auto TiledArray::math::linalg::non_distributed::lu_solve | ( | const ArrayA & | A, |
| const ArrayB & | B, | ||
| TiledRange | x_trange = TiledRange() |
||
| ) |

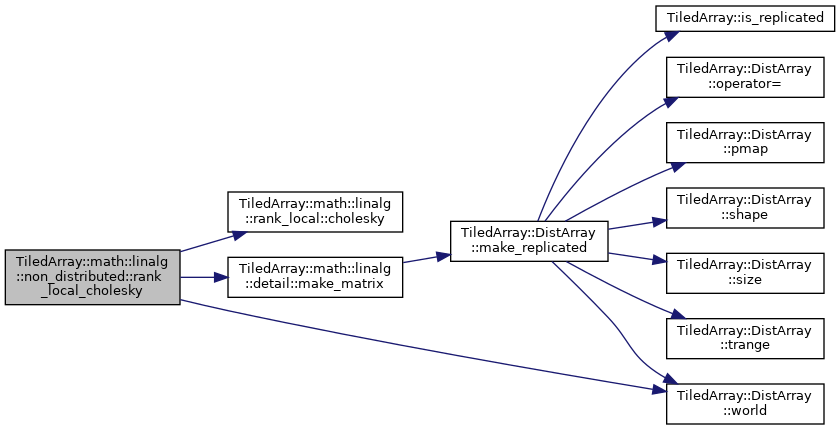
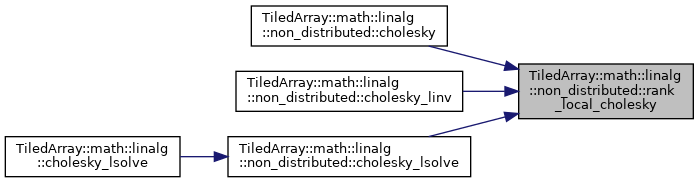
◆ rank_local_cholesky()
| auto TiledArray::math::linalg::non_distributed::rank_local_cholesky | ( | const DistArray< Tile, Policy > & | A | ) |
Definition at line 36 of file cholesky.h.
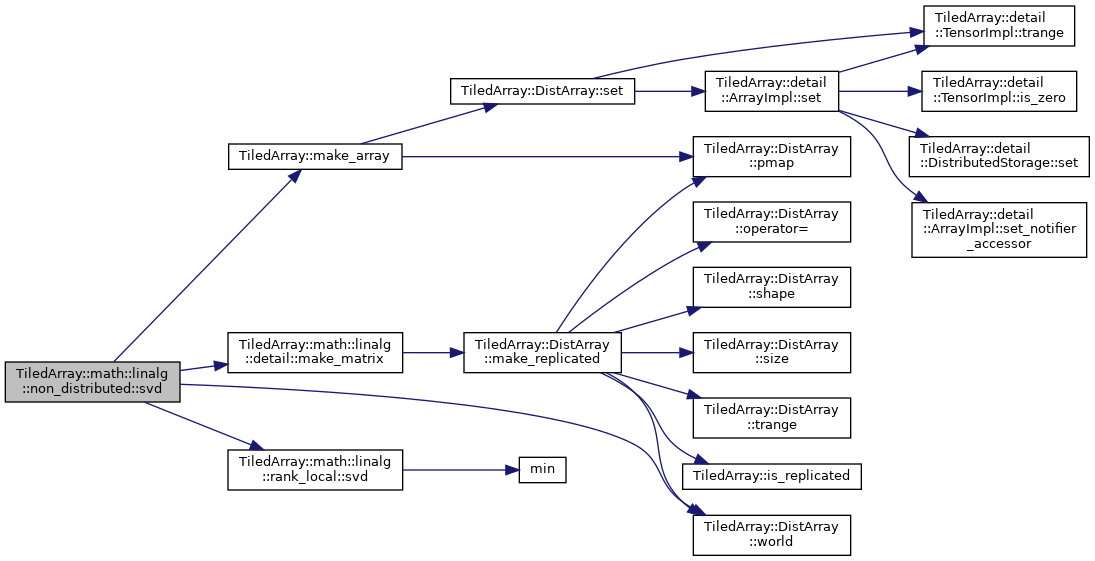
◆ svd()
| auto TiledArray::math::linalg::non_distributed::svd | ( | const Array & | A, |
| TiledRange | u_trange = TiledRange(), |
||
| TiledRange | vt_trange = TiledRange() |
||
| ) |
Compute the singular value decomposition (SVD) via ScaLAPACK.
A(i,j) = S(k) U(i,k) conj(V(j,k))
Example Usage:
auto S = svd<SVDValuesOnly> (A, ...) auto [S, U] = svd<SVDLeftstd::vectors> (A, ...) auto [S, VT] = svd<SVDRightstd::vectors>(A, ...) auto [S, U, VT] = svd<SVDAllstd::vectors> (A, ...)
- Template Parameters
-
Array Input array type, must be convertible to BlockCyclicMatrix
- Parameters
-
[in] A Input array to be decomposed. Must be rank-2 [in] u_trange TiledRange for resulting left singular vectors. [in] vt_trange TiledRange for resulting right singular vectors (transposed).
- Returns
- A tuple containing the eigenvalues and eigenvectors of input array as std::vector and in TA format, respectively.
Definition at line 59 of file svd.h.